Much of this content is elaborated upon elsewhere on this site. It is summarized here for convenience.

2023 - Research: In the final primary project of my PhD, I developed a new valve for controlling pneumatic soft robots using electropermanent magnets. I used this valve to control a soft robot with six degrees of freedom and one pressure input that could grasp or locomote.
This work is as-yet unpublished.

2023 - Research: I collaborated on the development of a soft laproscopic grasper for minimally invasive intestinal surgery. I developed the apparatus for testing the end effector’s force output.
This work is being presented at the 15th Hamlyn Symposium on Medical Robotics and will be published at a later date.

2023 - Research: I collaborated on the development of a stiffening mechanism for soft robots that combined magnetorheological fluid with principles from jamming. I was heavily involved in the conception of this project and developed the testing apparatus for quantifying its performance. I also conducted the magnet simulations.
This work was published in Soft Matter.

2022 - Research: I collaborated on the development of a minimally invasive surgical device for providing variable occlusion in the aorta during the treatment of internal hemorrhages. I provided technical expertise to assist in the development of the fluidic testing system in which the device was immersed.
This work was presented at the American Heart Association Resuscitation Science Symposium and will be published at a later date.

2022 - Research: I collaborated on the development of a new type of collapsible soft actuator. I developed testing apparatus for quantifying the actuator’s performance, and contributed to the drafting of the manuscript.
This work was published in Advanced Intelligent Systems.

2022 - Research: In the next primary project of my PhD, I developed a method for controlling soft robots using a magnetorheological fluid and electropermanent magnets. This method allowed for full, continuous control over the pressure in the soft actuators. I demonstrated this method by controlling soft robots with three actuators controlled in a binary manner, and two actuators controlled in a fully modulated manner.
This work was published in IEEE Robotics and Automation Letters and presented at the 2022 International Conference on Robotics and Automation.

2021 - Research: I authored a review of onboard control hardware for fluidically actuated soft robots. This paper categorized different classes of control hardware and developed a set of criteria for comparing them.
This work was published in Frontiers in Robotics and AI.

2020 - Research: In the first primary project of my PhD, I developed a method for controlling soft robots using magnetorheological fluid and permanent magnets. I was able to control as many as five points of actuation by positioning magnets around the robot.
This work was published in Advanced Intelligent Systems.

2020 - Research: I collaborated on a work investigating the performance of magnetorheological fluids with shear-thickening additives. I contributed to the revision of this manuscript and its images, while the applications I contributed during this time were incorporated into a separate document, detailed above.
This work was published in Smart Materials and Structures.

2020 - Research: I collaborated on the development of a soft sensor for the simultaneous measurement of pressure and strain. I mentored the students who were conducting this project, providing technitcal expertise, design guidance, and assistance in collecting data.
This work was published in the proceedings of the 2022
IEEE International Conference on Soft Robotics (RoboSoft).

2019 - Coursework: As part of my Medical Robotics class, my group and I designed and manufactured a soft robotic device to automatically apply pressure to the femoral artery after the removal of a catheter.
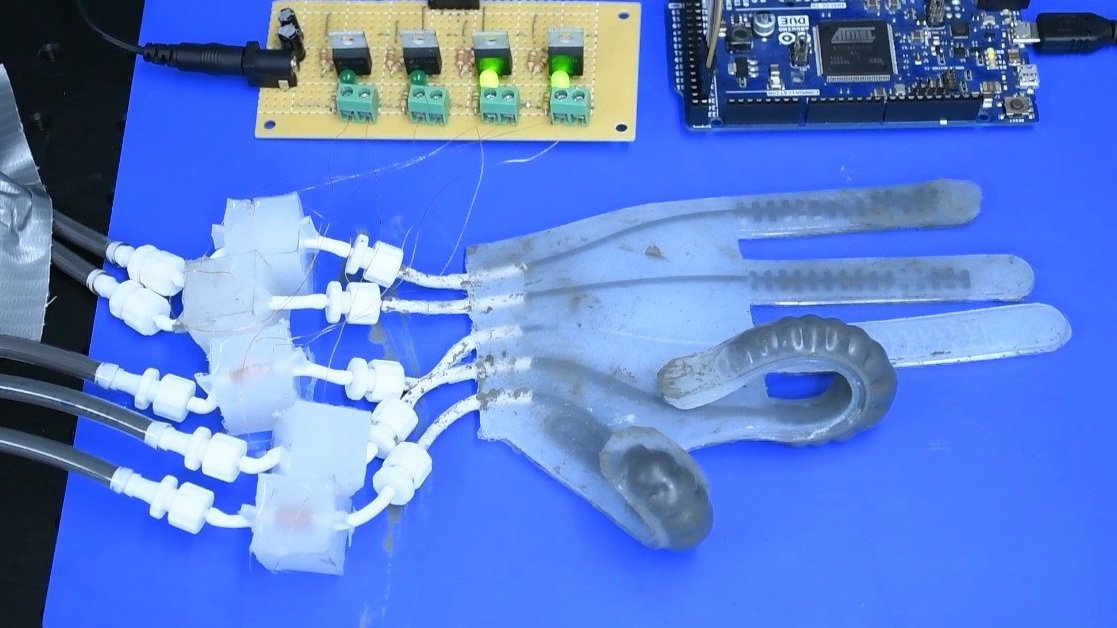
2019 - Coursework: As part of my Vision, Robotics, and Planning class, I investigated using an MR fluid and electromagnets for controlling the inflation of a multi-degree of freedom soft robot. What I learned while doing this project was eventually incorporated into my first major publication.
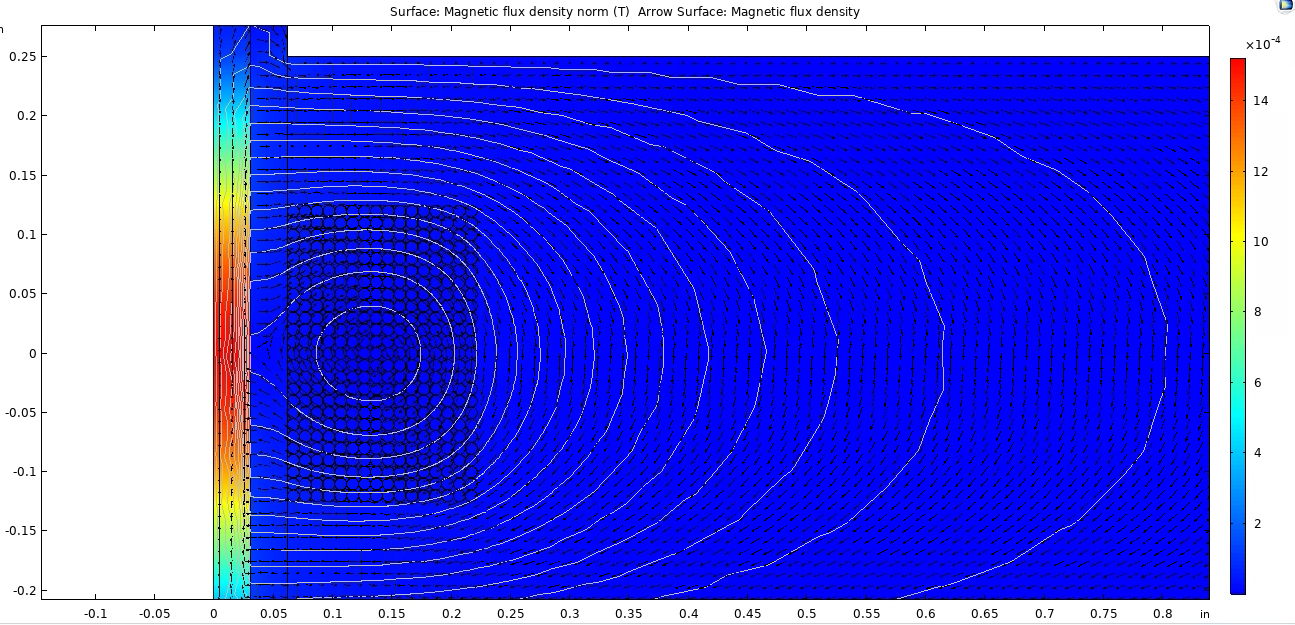
2019 - Coursework: As part of my Simulations of Physical Processes class, my group members and I attempted to simulate the effect of an applied magnetic field on a flowing MR fluid using COMSOL. What I learned while doing this project was eventually incorporated into my first major publication.

2018 - Coursework: As a group project for my Machine Design class, I helped design a machine for automatically processing fluidic chips. We conducted extensive dynamical analysis of the machine components, performed a financial analysis, and presented our progress and results in several design reviews.

2018 - Research: I collaborated on the development of a origami device for chemical sensing. I developed a model for describing the device’s deformation.
This work was published in the proceedings of the 2018 ASME Conference on Smart Materials, Adaptive Structures and Intelligent Systems.

2018 - Coursework: For my senior design project, my group and I developed a method for capturing low temperature thermal energy using an oscillating bimetallic strip and piezoelectric generators.
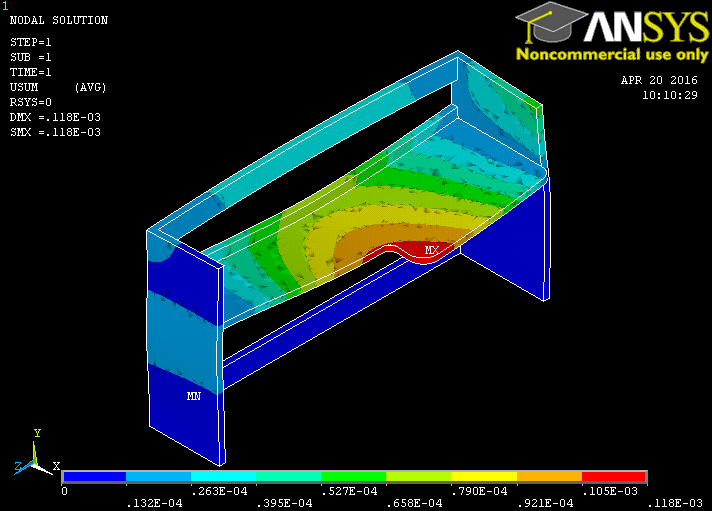
2016 - Coursework: For the final project of my Finite Element Analysis course, I conducted a mechanical analysis in ANSYS of a piece of furniture in my dorm room.

2016 - Personal Projects: Using my burgeoning knowledge of CAD, I designed and manufactured furniture to house my television and stereo equipment.